Beagles
General Arrangement
Sub-Teams: Drivetrain, Propulsion, Electrical, Hall & Frame, Dead Man’s Buoy (DMB), Mech Steering, Computer Aided Vision (SubSee), Data Acquisition System (DAQ)
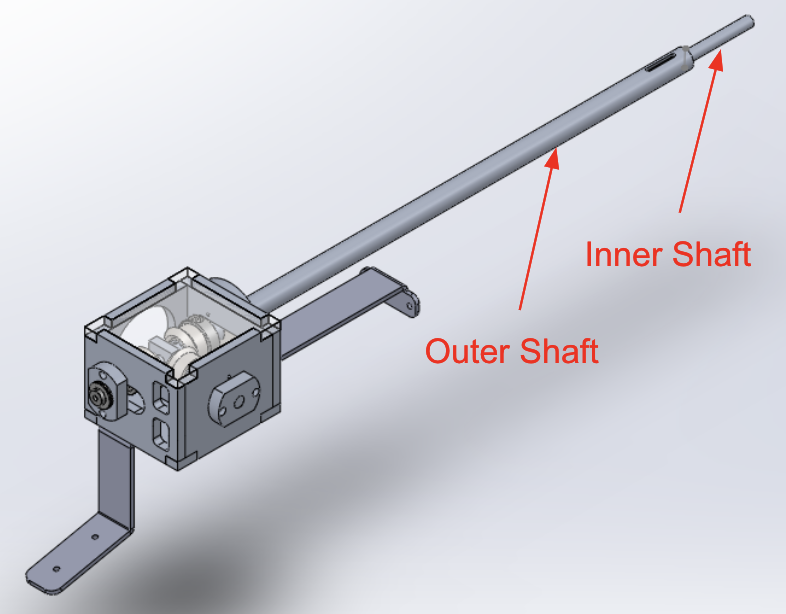
Drivetrain
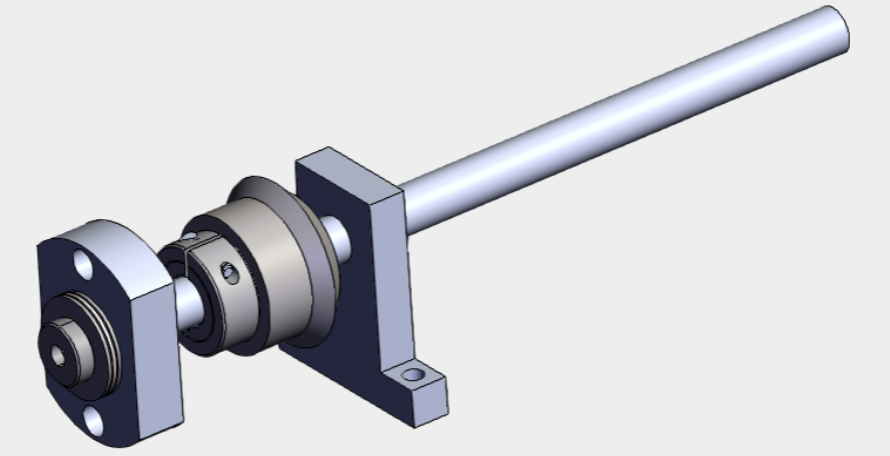
Inner Shaft
- Driven by input shaft
- Propeller is mounted to end of shaft and rotates with it
- Shaft: ⌀12mm, Al 6061 T6
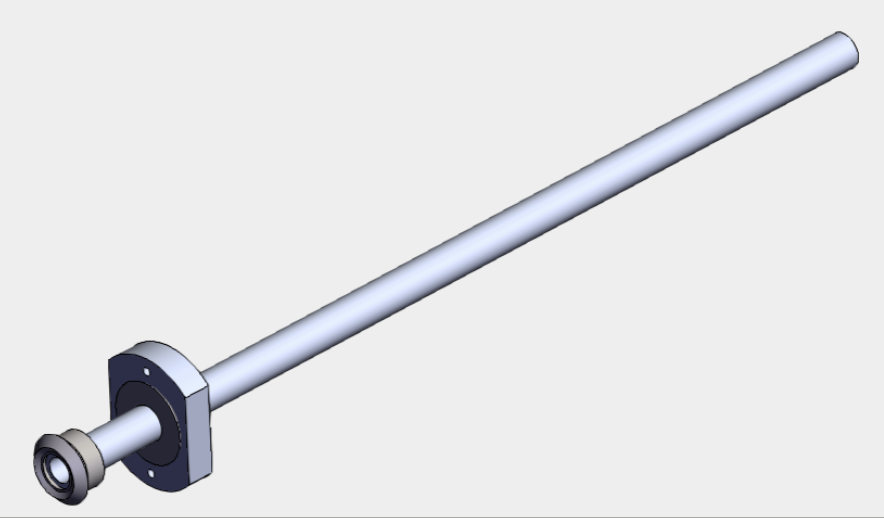
Outer Shaft
- Driven by input shaft
- Propeller is mounted to end of shaft and rotates with it
- Shaft: ⌀0.875” ID, ⌀0.635” OD, Al 6061 T6
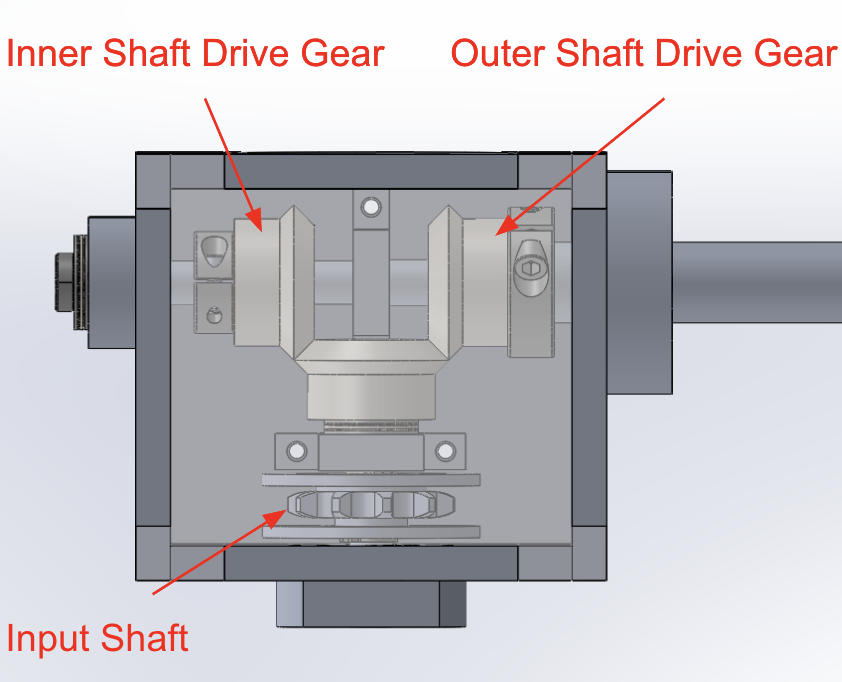
Bevel Gear and Pinion
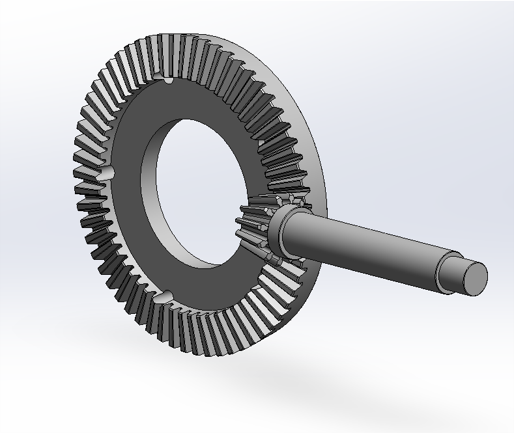
- Same 5:1 ratio used in previous designs
- Straight-tooth gears were selected
- Limited availability of helical gears in 5:1 ratio
- Insufficient torsional strength of plastic gears
- Material removed from center
- Weight savings
- Integration with spindle and pedals
Purpose: Convert pilot rotary input into dual contra-rotating propeller rotation
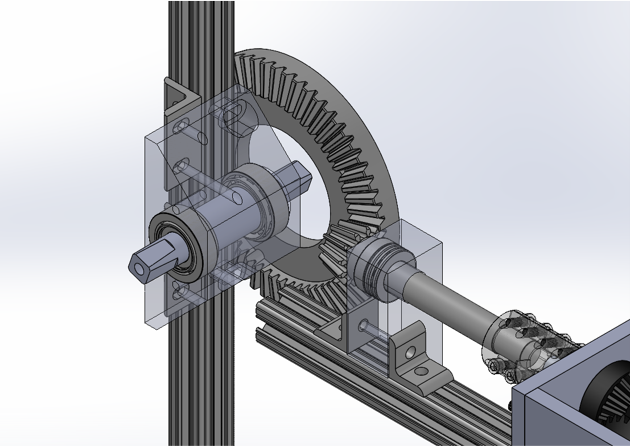
Direct Drive System - Latest Model
- A bearing block added to address forces from the gears
- Also addresses the cantilever problem
- New spindle housing to match the length of the spindle
- Important notes to consider after doing some tests
Bearing Block
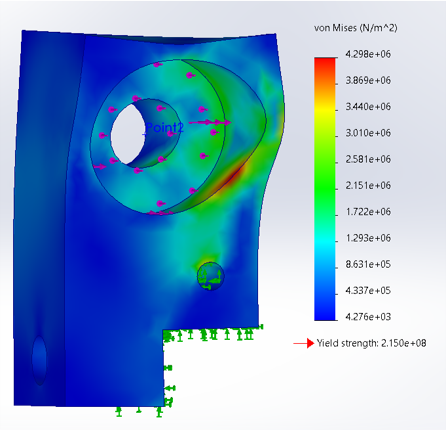
- Approximate input torque of 30 Nm as reported from last year
- Block tested in combined loading
- Bearing load from radial force component
- Distributed load on shoulder face from axial component
- Minimum factor of safety of 12 when using nylon as material
Propulsion
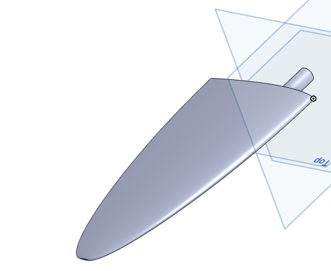
Fin Prototype Designs
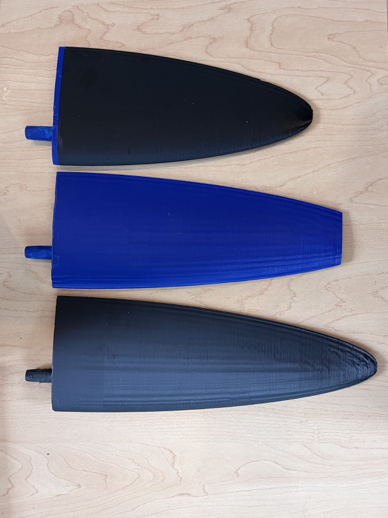
0012 Round
- Greatest lift coefficient
- Full size 30cm in length
0012 Round Cutoff
- Slightly reduced drag (less wingtip vortices)
0012 Round Scaled (⅔ scale)
- Smaller to fit normal 3d printers
- Part snapped in coupler with servo
Electrical
Vision + Data Acquisition: Heads Up Display, Image Processing, and Absolute Orientation Sensor



- New display screen integrated for horizontal orientation
- Fits a thinner, blue robotics enclosure for ease of mounting and known waterproof reliability
- Uses Raspberry Pi 4B for video processing algorithms
- Gathers underwater recordings
Electrical Steering: Motor Control for Mech Steering (Arduino Nano), Hall-effect Joystick, Autonomous and Manual Control Modes
- Joystick (Hardware)
 1.png)
 2.png)
 3.png)
- Joystick (3D Structures)
 1.png)
 2.png)
- Hall-effect PCB inside enclosure
- Joystick with magnet to be mounted to outside of enclosure
 3.png)
 4.png)
- Backup PCB Mount (friction fit)
- Steering PCB
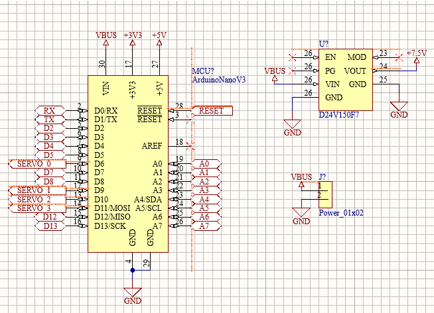
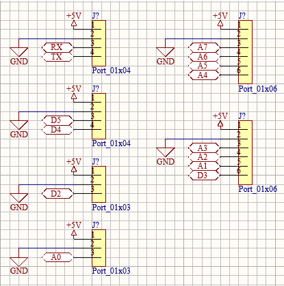
- Similar to last year’s design
- Power from BMS
- Buck Converter to regulate 7.5V powering servo
- Arduino Nano MCU controlling the servo motor and other ports
- What’s new
- Adapt to the new servo motor (SER-2000)
- Duration extension of stall current
- PTC Resettable Fuse (through-hole) for overcurrent protection
| D845WP (Old Servo) | SER-2000 (New Servo) | |
|---|---|---|
| Stall Current | 10A | 3.9A (Damaged after 5 – 10s) |
| Operating Temperature | Operating Temperature | Operating Temperature |
Battery Management and Power Delivery: Motor Control for Mech Steering (Arduino Nano), Hall-effect Joystick, Autonomous and Manual Control Modes
- Battery Choice
-

- Selected LiFePO4 (LFP) battery for additional safety consideration.
- Picked highest capacity cells (15Ah) that would fit in last year’s BMS/Steering enclosure.
- Purchased four cells with one spare for a 3S battery configuration.
- Improvement in overall runtime from last year.
-
- Choice of BMS
-
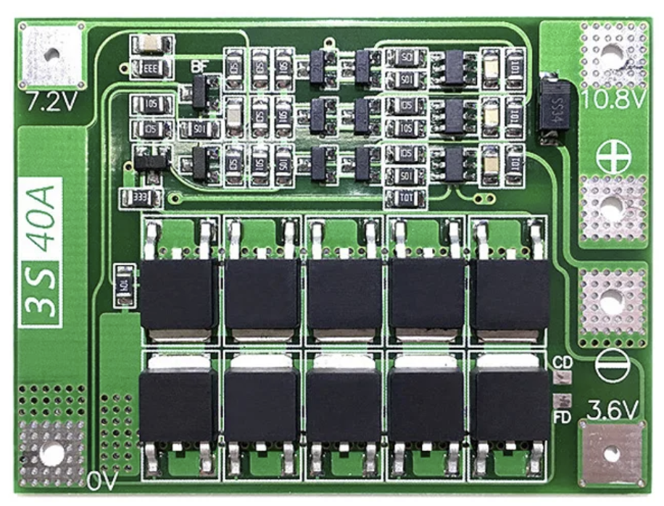
- Selected off-the-shelf BMS design to reduce complexity.
- Opted for 9.6V 3S BMS, so we could use last year’s steering board for voltage regulation.
- BMS board rated at 40A which is well above what the servos would need.
- Takes up minimal space inside the enclosure allowing easier integration.
-
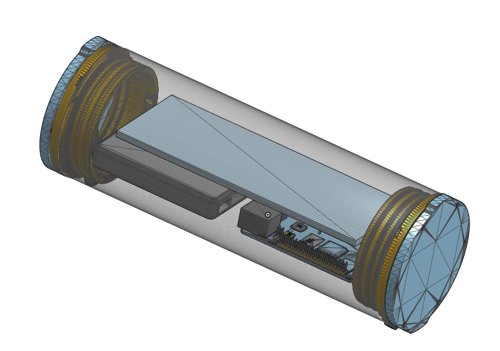
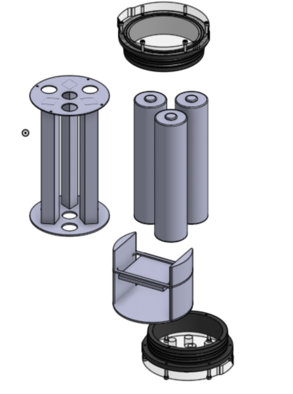
Enclosures/Harnessing: Water damage control, connecting everything together, ease of access
-
-
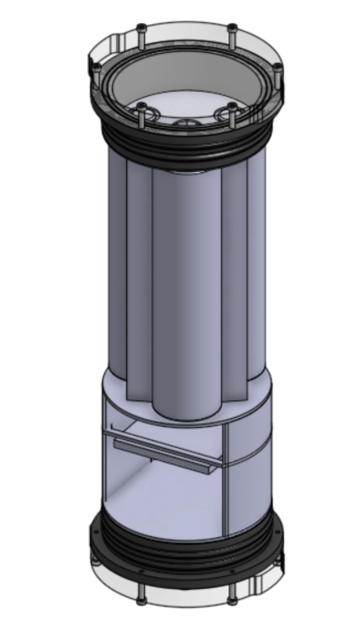
- Made out of MDF and 3D printed materials (non-conductive).
- Resistant to movement and secures the batteries.
- Able to be taken out in one piece for ease of maintenance.
- Enough space for thick wire gauges and minimum bend radius.
- We used 4 waterproof enclosures for each system.
- One small enclosure for the camera
- One small enclosure for the joystick
- One medium enclosure for the display + raspberry pi
- One large enclosure for the batteries, BMS, steering board, and Arduino Nano
- Each enclosure is bought from Blue Robotics
- In the progress of testing and monitoring using vacuum pressure pump