2022-2023
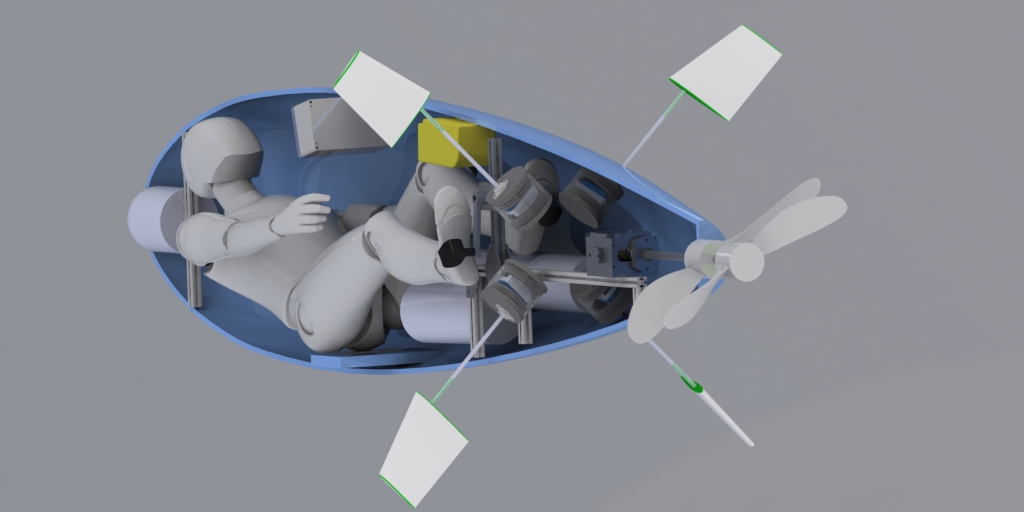
SUBC is currrently building a new propeller-driven, human-powered submarine where the pilot is seated in a recumbent position. The trained pilot will be facing the stern of the submarine and will navigate through the course using an electronic vision system.
This year, our team will be competing at the International Submarine Races (ISR) in Maryland, where we intend to push our submarine to its limits in a 100-meter race and win against universities from all around the world.
Sub-teams
Hull & Frame
This year, the team designed a new hull by determining the space requirements of our pilot and all our other internal subsystems, all while conducting CFD simulations to minimize the drag acting on the submarine. The hull is made out of 7 layers of carbon fibre, utilizing a CNC machined wooden mould to carry out all of our layups. A new hatch and frame system was also designed to accommodate different pilots during competition.
Mechanical Steering
The mechanical steering system consists of a set of fins that allow the pilot to control the direction in which our submarine moves. The X-form configuration that we implemented this year allows the submarine to achieve pitch, yaw, and roll motions more efficiently compared to the traditional cartesian configuration. Besides having conducted CFD analyses on different airfoils to select the optimal fins for our submarine, this team has overcome some of the challenges of waterproofing motors, and has proven the success of their electromechanical system in past pool tests.
Drivetrain
The drivetrain team has been involved with designing a new chair and pedal mechanism for the pilot. As part of the development process, the team has conducted tests to determine our system’s potential input power, as well as to identify points where pilot ergonomics could be improved. The Drivetrain sub-team is also in charge of developing the chain drive and gearbox system, which are used to transmit the pilot’s input power to the propellers.
Propulsion
This year, the propulsion system consists of a set of contra-rotating propellers, which have been designed with the help of specialized open-source software. In order to reach our target speed, all while generating a desirable thrust and torque with our current hull form, extensive CFD analyses were performed by Propulsion team members. This system is integrated to the drivetrain system using two hubs which are attached to the output shafts that leave the gearbox.
Safety (DMB)
The Dead Man’s Buoy (DMB) is the safety system of the submarine, without which we cannot compete in the international races. By developing a fail-safe mechanical system, this team guarantees that if a pilot ever finds themselves in a state of distress, an emergency buoy will be deployed and the rescue divers will come to assist the pilot immediately.
Electrical
The electrical sub-team is responsible for various systems within our submarine, which greatly enhance the performance of our pilot, and without which racing in the new submarine (with the pilot facing the stern) would not be feasible. One of the systems that this team manages is the data acquisition (DAQ) system, which aims to provide a unified platform for collecting, storing, and distributing data from sensors within the submarine. Some examples of the data collected, which is logged in real time, include depth, acceleration, angular velocity and orientation. Moreover, this team overlooks the power systems and battery management system (BMS) in the submarine, along with all the corresponding watertight enclosures. This year, the group has continued to improve upon the electronic vision system, which consists of a camera at the bow of the submarine and a screen that allows the pilot to navigate and view key metrics. Lastly, the sub-team is in charge of developing an electronic steering system that interfaces with the mechanical steering system through a joystick, providing a reliable and user-friendly way for the pilot to control the submarine’s direction.